

在近年来制造业人手不足和人工成本急剧上升的背景下,推动依赖人力的装配、检测、搬运等工序的自动化改造,正在成为当务之急。
尤其是在产品的装配工序中,必须对形状复杂的散装部件实施部件拣选,再送入自动设备。
该作业要求工人根据部件的交货形态和地点,判断部件的形状,取出部件并排放整齐。
这项作业的自动化,要求设备以与人同等的速度进行部件识别和灵活操作,因此始终难以得到推进。
信息更新: 2022年11月8日
从枯燥乏味的重复性作业中解放
以往必须依赖人工的散装部件进料工序
占用的作业空间与人相仿
无需大幅改变生产现场布局,就能引入3D视觉传感器。
外形紧凑、重量轻巧 只需留出机器人的安装空间
【FROM】需要大幅改变生产现场布局
传统3D图像传感器体型较大,安装时要动用大型设备,仅依靠原有作业空间难以安装,必须大幅改变布局。
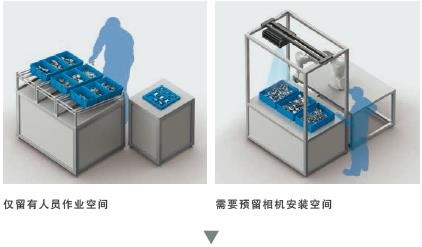
【TO】占用的作业空间与人相仿
专为轻量级小型机械臂设计的3D视觉传感器,仅需与人相仿的安装空间。
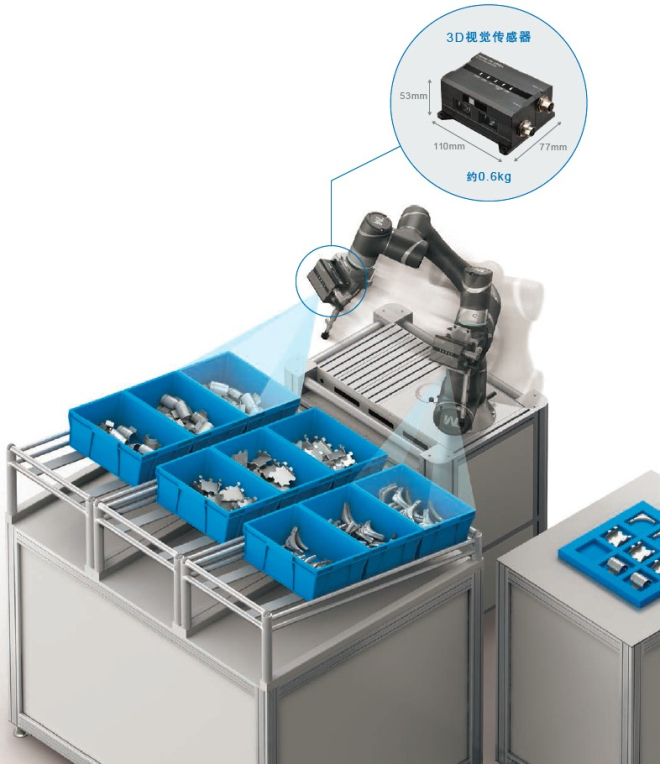
灵活拣选
搭配机器人使用,可以拣选分散在托盘和货架上的部件,像人一样灵活。
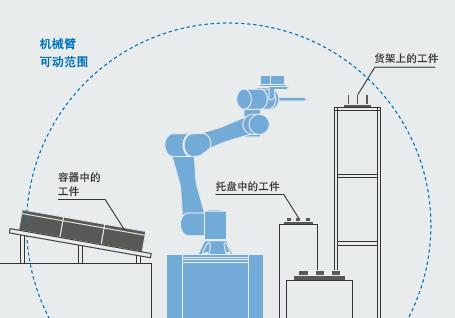
轻松移动
借助搭载3D视觉传感器的机械臂、协作机器人和移动工作站,这款拣选系统可根据作业地点,灵活地进行移动及布局调整。

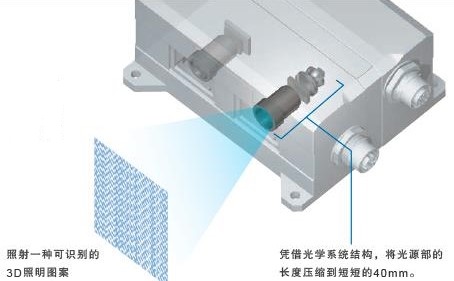
可搭载于协作机器人的小型轻量化光学技术
传统的相位差3D相机必须配备变换照明图案的投影结构,导致体积过大。新利的3D测量技术则借助勾勒精细图案纹样的光掩膜,缩短光路,成功实现了小型化。
以近乎于人的速度和灵活性,加快拣选节拍
凭借高水准的3D图像传感技术,实现了高速准确的部件识别。
0.4秒*1高速检测 确保机器人自动拣选更流畅
借助可生成3D形状图像的3D测量技术以及识别对象姿态的3D识别技术,实现部件高速检测。

*1. 本公司指定条件下,3D测量和3D识别的合计时间。具体时间因对象而异。
*2. 在本公司指定条件下测得的参考时间。
杜绝死角、稳定检测
根据部件在箱体内部的位置,可能存在固定安装相机无法检测到的死角。因此,需要通过摇晃箱体等措施,令部件进入视野,造成设备尺寸变大、成本升高。采用机械臂配套相机,可在检测时切换视角,因此无需引大型设备,即可稳定检测部件。

0.4秒高速检测
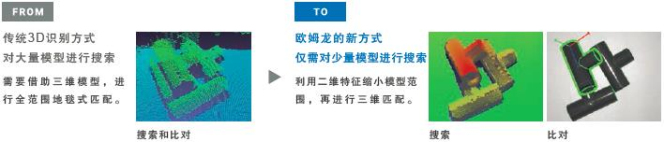
仅需拍摄1次的“3D测量技术”

高速2D搜索技术的升级版——“3D识别技术”
无需熟练工,无需安装手册,轻松安装维护
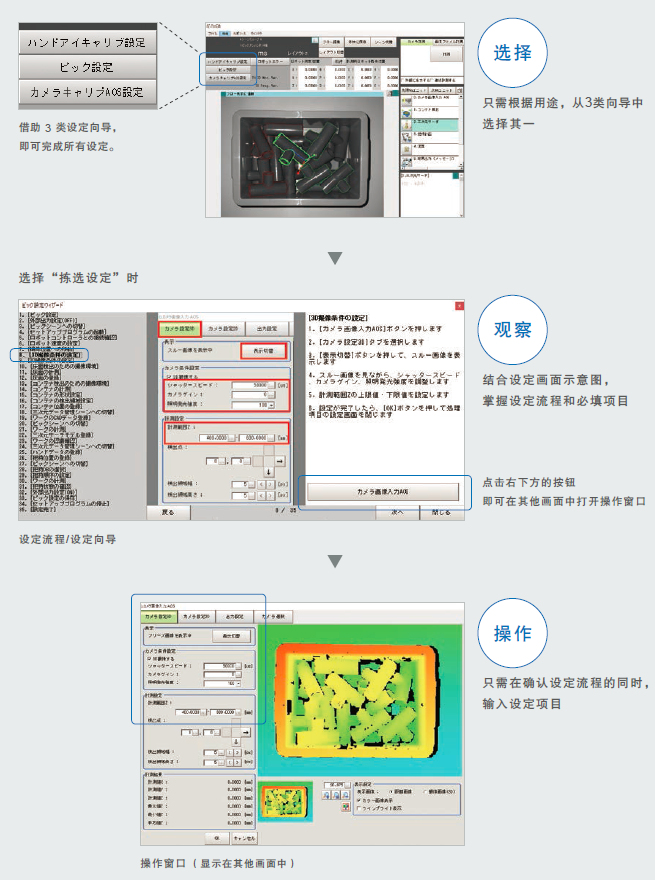
对于从相机设定到校准设定的一系列流程,只需利用向导菜单启动拣选应用,根据提示操作,即可完成应用设定。
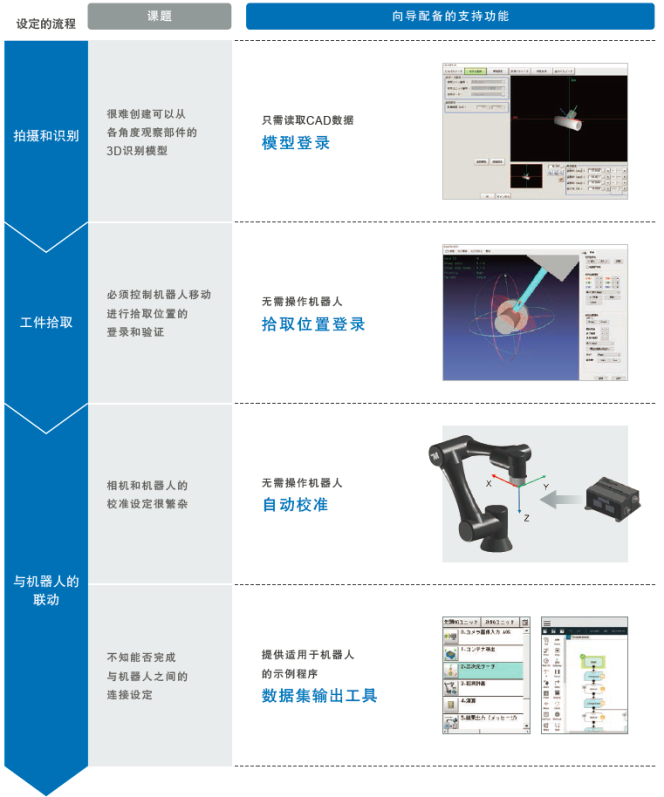
向导设定功能
无需手册,即可根据向导提示,完成启动拣选应用所需的大约80项设定。
【拍摄和识别】模型登录
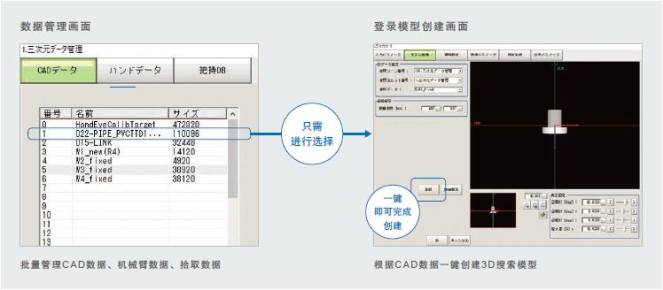
只需读取部件的CAD数据,就能自动创建3D搜索模型。
此外,部件的CAD数据、拾取点的设定数据以及各类机械臂的数据,均可实现全场景通用的批量管理。
如需添加品种,可直接复制场景数据,利用批量管理的CAD数据,创建新增品种的搜索模型。
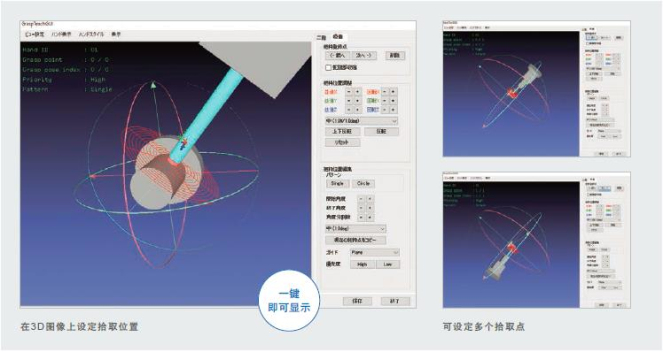
【工件拾取】拾取位置登录拍摄和识别
无需实际操作机器人,即可通过部件的CAD数据,设定拾取位置。
【与机器人的联动】自动校准
无需复杂设定,自动校准3D视觉传感器和机器人。

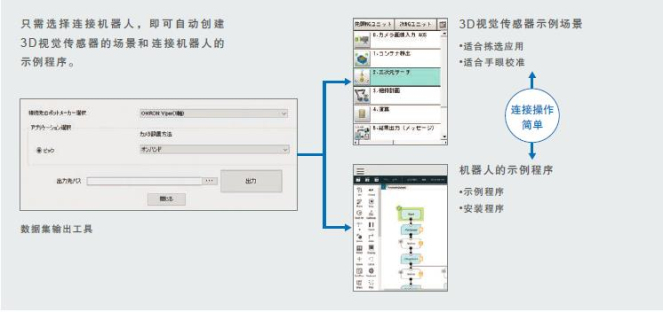
【与机器人的联动】数据集输出工具
提供适用于连接机器人的示例场景、机器人连接程序。
购买产品后,只需注册会员,即可免费下载用于创建示例程序的数据集输出工具。
详情请见3D机器人视觉应用软件随附的会员注册表。
信息更新: 2022年11月8日
 400-820-4535
400-820-4535
![]() 微信服务号
微信服务号

![]() 微信资讯号
微信资讯号

© Copyright 新利官方网站 版权所有 2005-2023.
All Rights Reserved.
 沪公网安备 31011502002231号
沪公网安备 31011502002231号
