(1) 位置控制
伺服驱动器可以接收脉冲串输入来进行定位控制。
① 脉冲输入模式
脉冲输入模式可以通过伺服驱动的参数来设置。
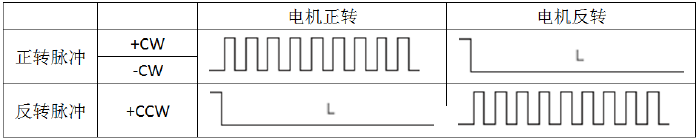
a. 正/ 反转脉冲输入
伺服驱动器通过接收正转脉冲和反转脉冲来控制伺服电机的速度和方向。
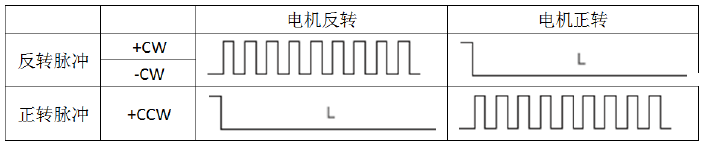
b. 脉冲+ 方向输入
伺服驱动器通过接受脉冲来控制伺服电机的速度,再通过接收方向信号来控制伺服电机的方向。
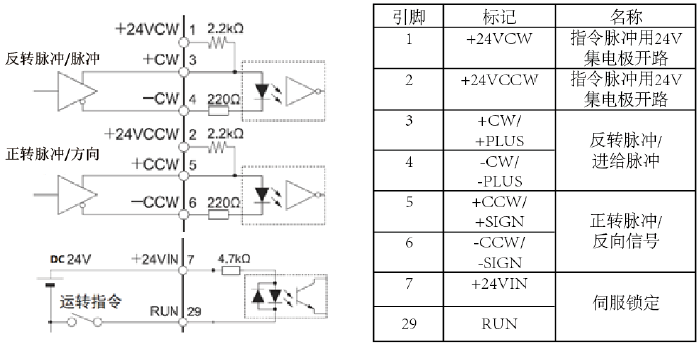
② IO 信号的连接图及标注
③ 脉冲输入的类型
a. 集电极开路输入
集电极开路输入适用于脉冲频率在200KPPS 以下时使用。
Ⅰ . 在外部24V 电源没有使用限流电阻时,此时输入伺服的脉冲信号必须经过伺服内部的限流电阻。
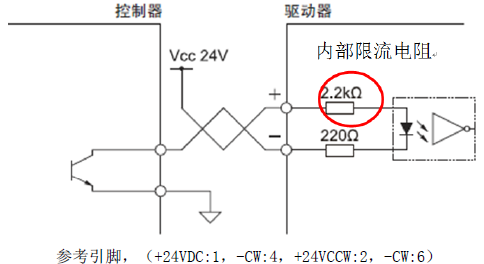
Ⅱ . 在外部24V 电源并有使用限流电阻时,此时输入伺服的脉冲信号不用经过伺服内部的限流电阻
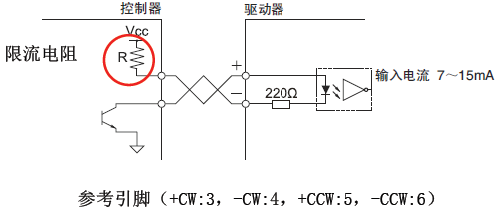
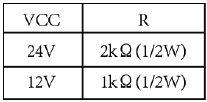
Ⅲ . 为了达到驱动器内部输出电流7 ~ 15mA 时,可以根据外部电压的大小来选择限流电阻。
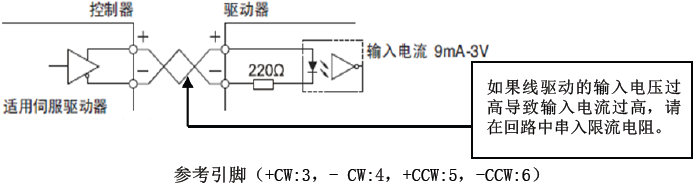
b. 线驱动输入
线驱动路输入适用于脉冲频率在500KPPS 以下时使用。
④ 常见故障
a. 接错IO 线,将24V 电源线或其他脉冲输入线接在不同的标注处,导致驱动器故障,如下图。
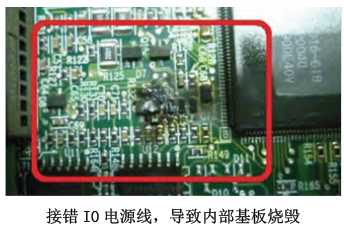
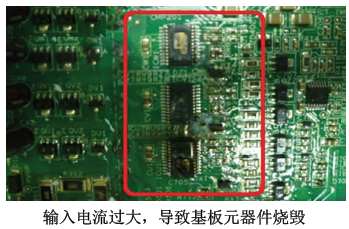
b. 没有使用限流电阻,导致内部输入回路电流过高,烧毁驱动基板,如下图。
(2) 速度控制
通过从速度指令输入端口输入模拟量电压信号来控制电机速度。
① IO 信号的连接图及标注
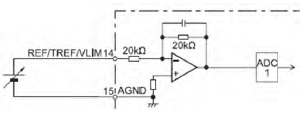
② 输入规格
最大允许输入电压DC±10V。
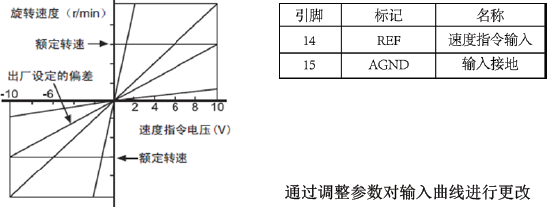
③ 输入特性
通过对速度指令的调整,可以对输入电压的增益,极性,偏差等进行设定。
④ 常见故障
输入模拟量超过范围,导致伺服驱动器IO 基板故障


