机器人统合系统
视控制为己任的新利,能做到的特殊机器人应用
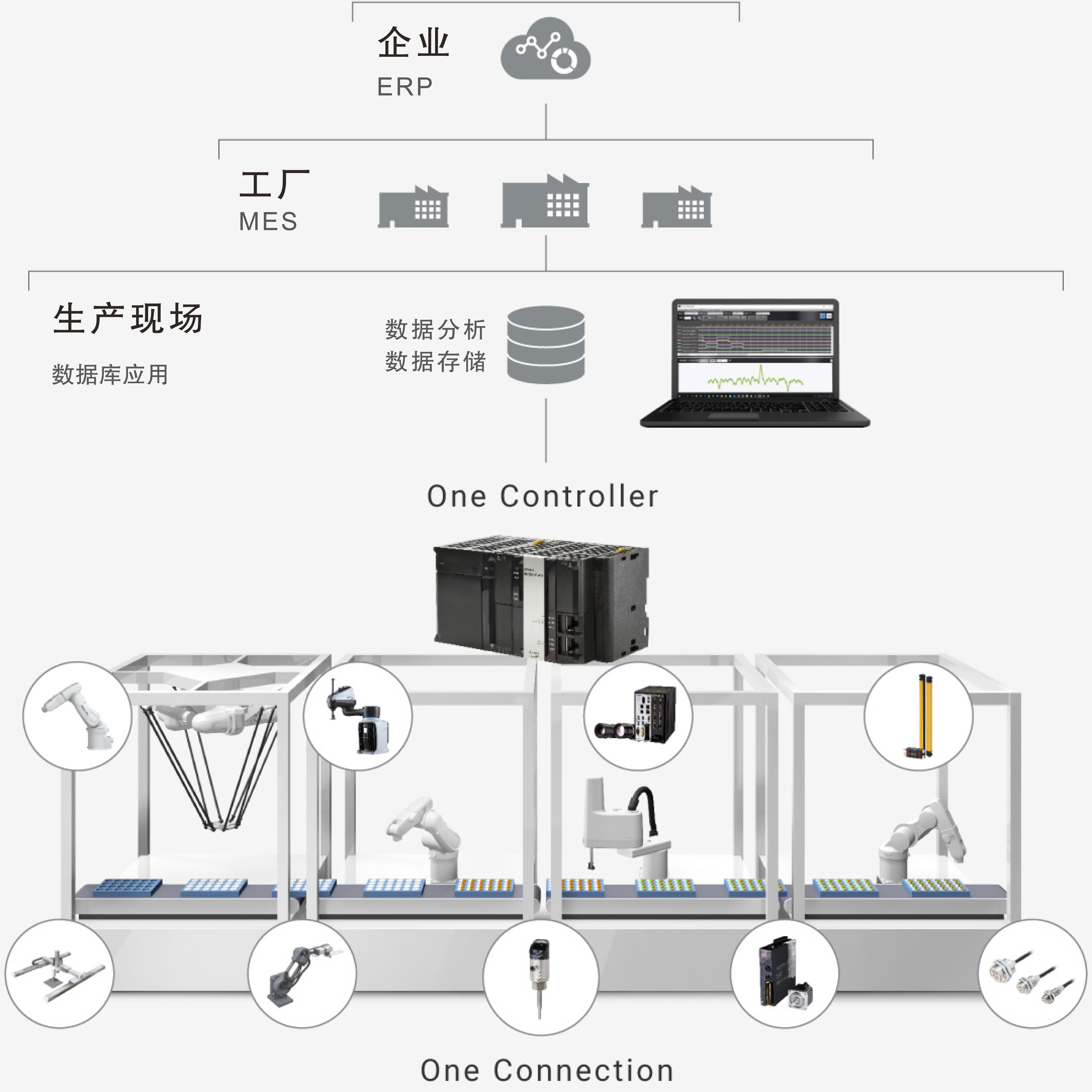
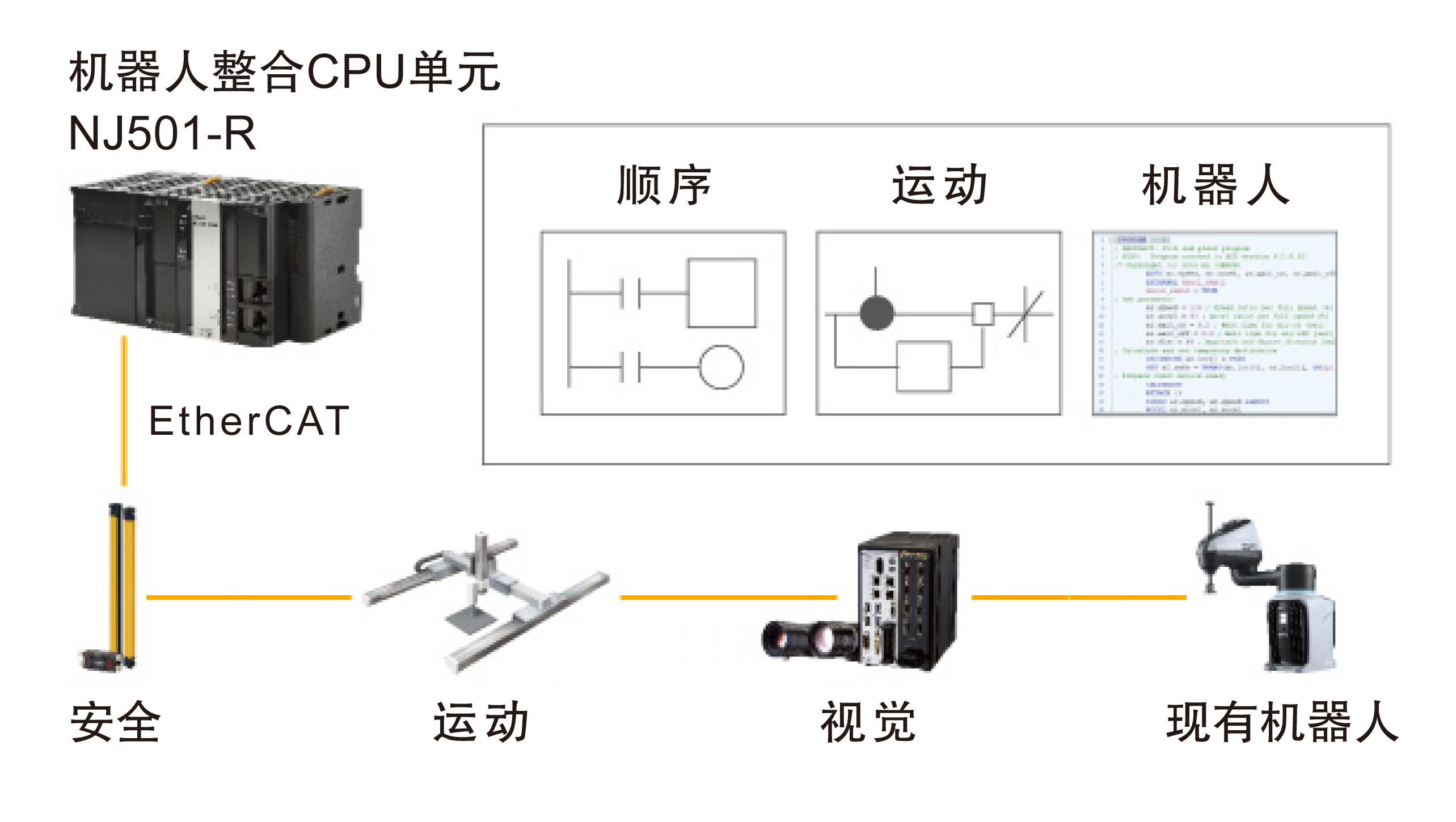
实现机器人和控制设备一体化控制的“机器人统合控制器”
“统合控制”,将机器人和外围设备的无缝统合,使以往只有人工才能做到的复杂作业实现高度自动化;统合构建流程”,利用真实与虚拟模拟技术,有效简化系统的构建和维护。两者统合,提供结合机器人的革新应用。新利凭借制造业所需的“各种控制设备群”以及长期积累的丰富应用知识和技术,实现不停机检测、校准的应用以及将工匠技术高度自动化的应用。






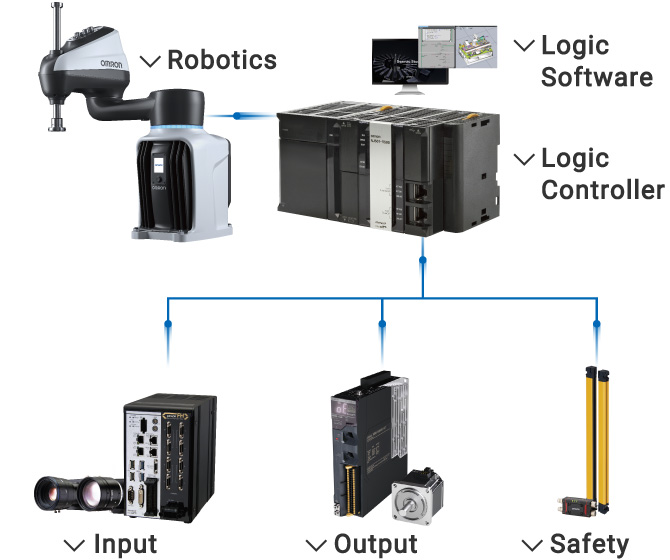
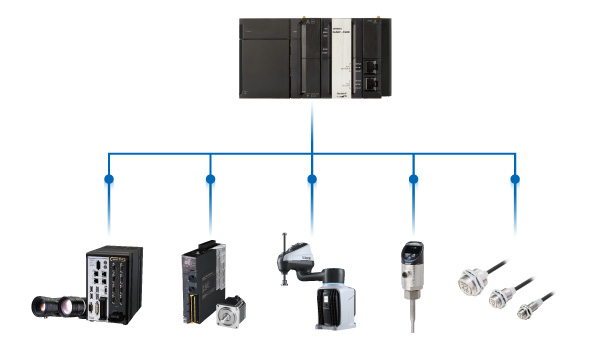
Logic Controller
One Controller无缝顺畅地统合顺序、运动和机器人控制
顺序、运动之外,还将机器人控制统合至One Controller中,包括机器人在内的各设备执行同步控制,并在同一时间轴收集各设备的“可用”信息。

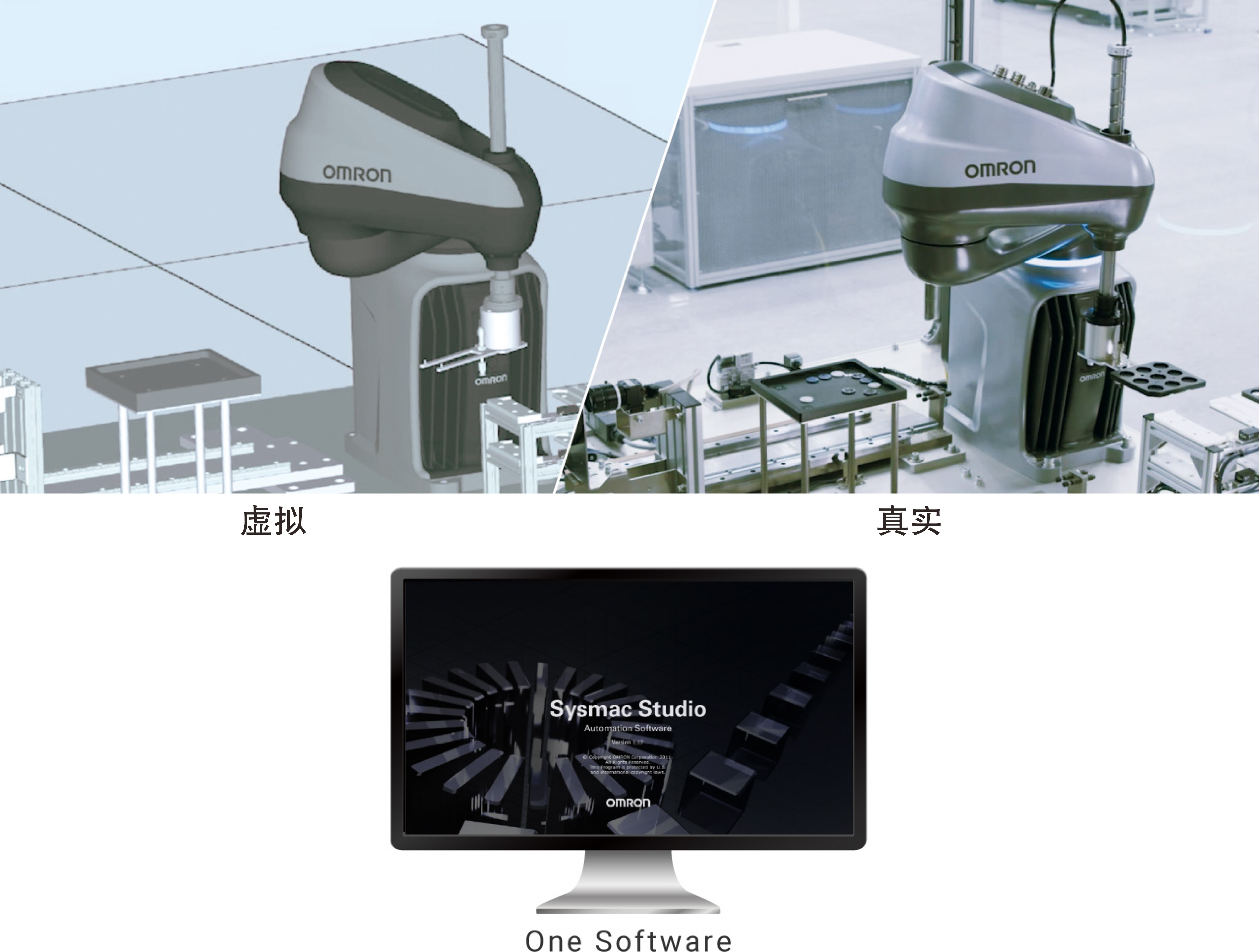
Logic Software
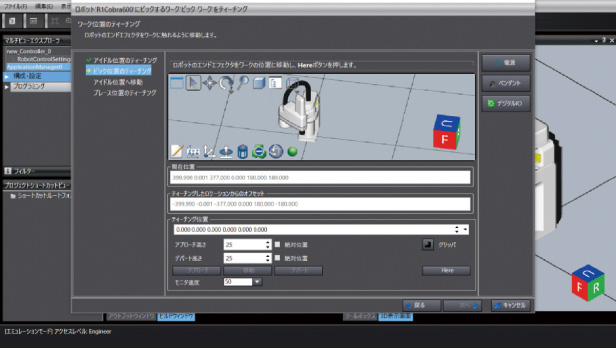
One Software即可实现机器人和机械控制相统合的编程和3D模拟,掀起工程链的革新
统一迄今为止相互独立的机器人和机械控制的编程语言,确立可在一个软件的统合开发环境中简单模拟的技术。在虚拟环境中将真实环境的生产设备连接起来,远程进行设备启动和维护。

Robotics
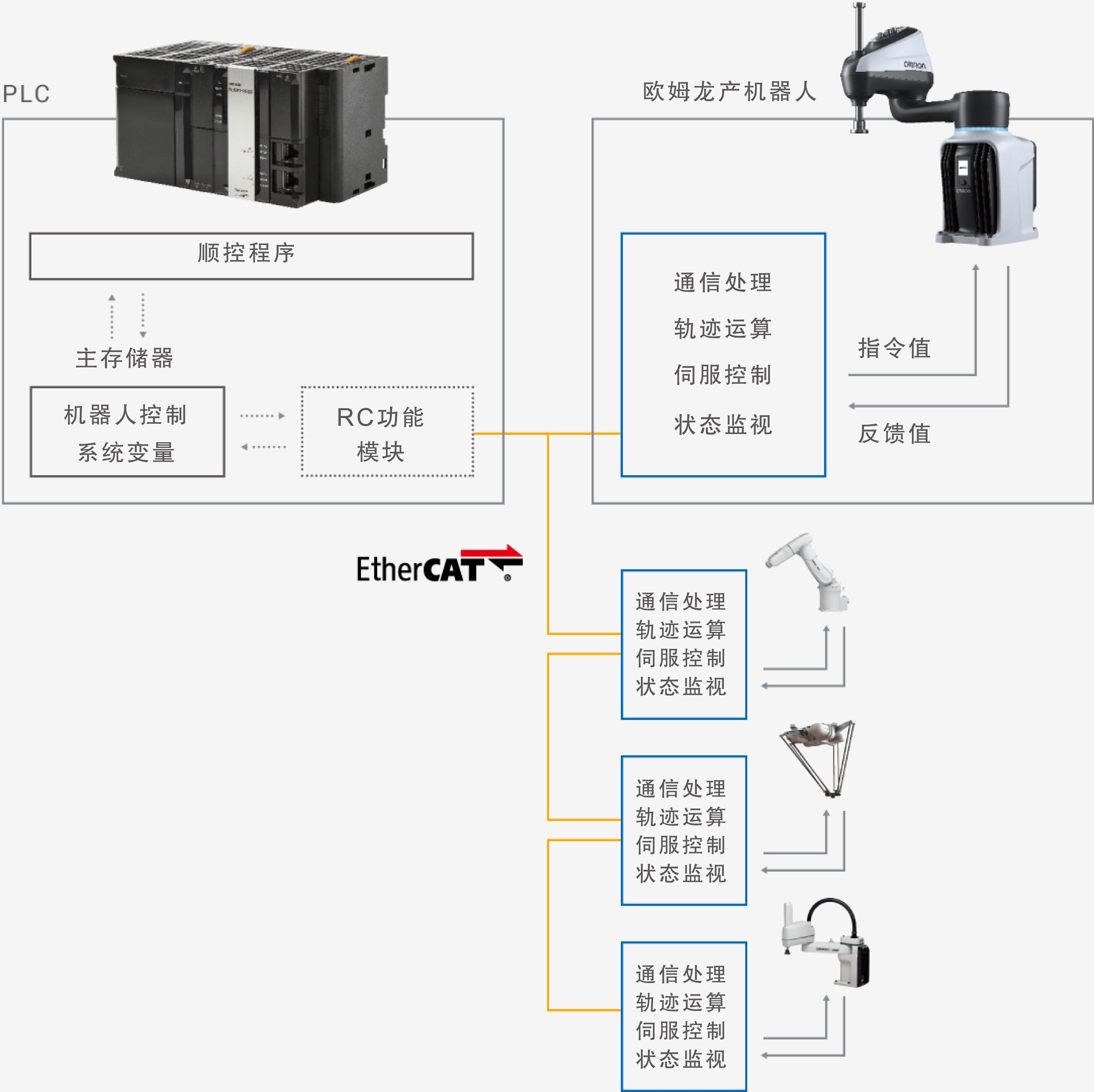
与PLC对驱动设备进行编程的方式一样,可轻松完成对机器人的编程
将机器人控制统合至PLC,在保持机器人自身的高速性、高精度的同时,可以与其他设备一样使用PLC,通过EtherCAT对机器人进行控制,PLC工程师也能控制机器人。

Input
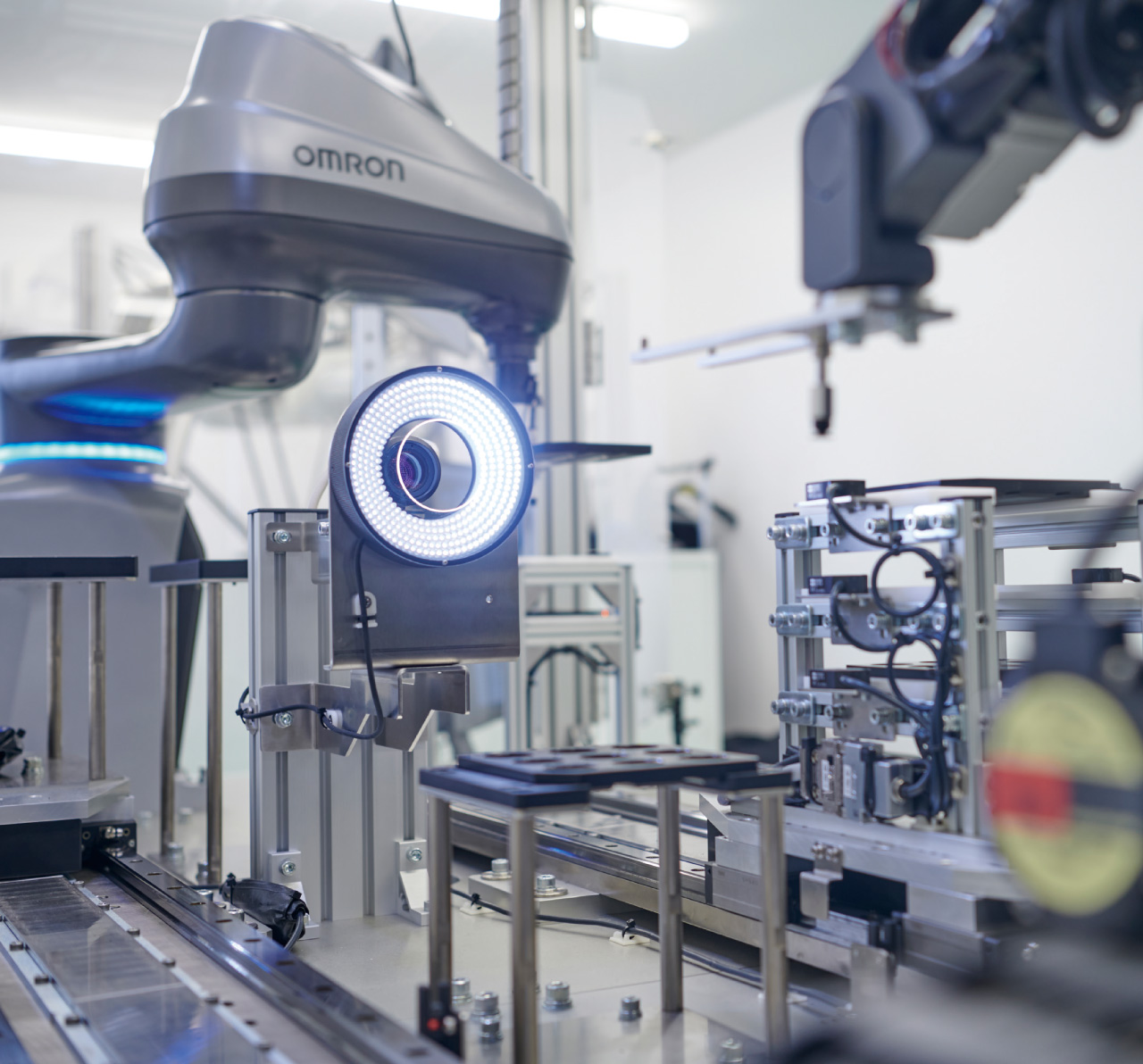
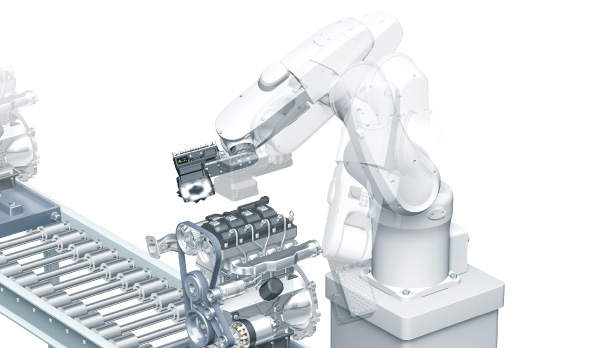
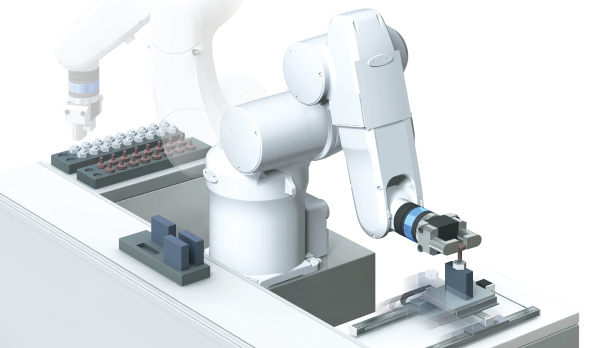
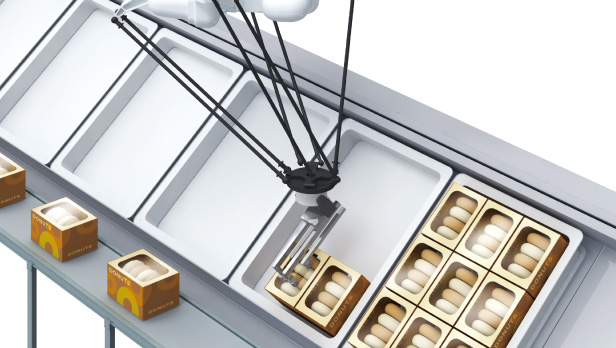
不停机检测实现检测吞吐量的最大化
通过统合图像传感器和机器人的控制,可不停机检测,同时在机器人上搭载图像传感器,实现不停机多点检测,最大化检测吞吐量。


Output
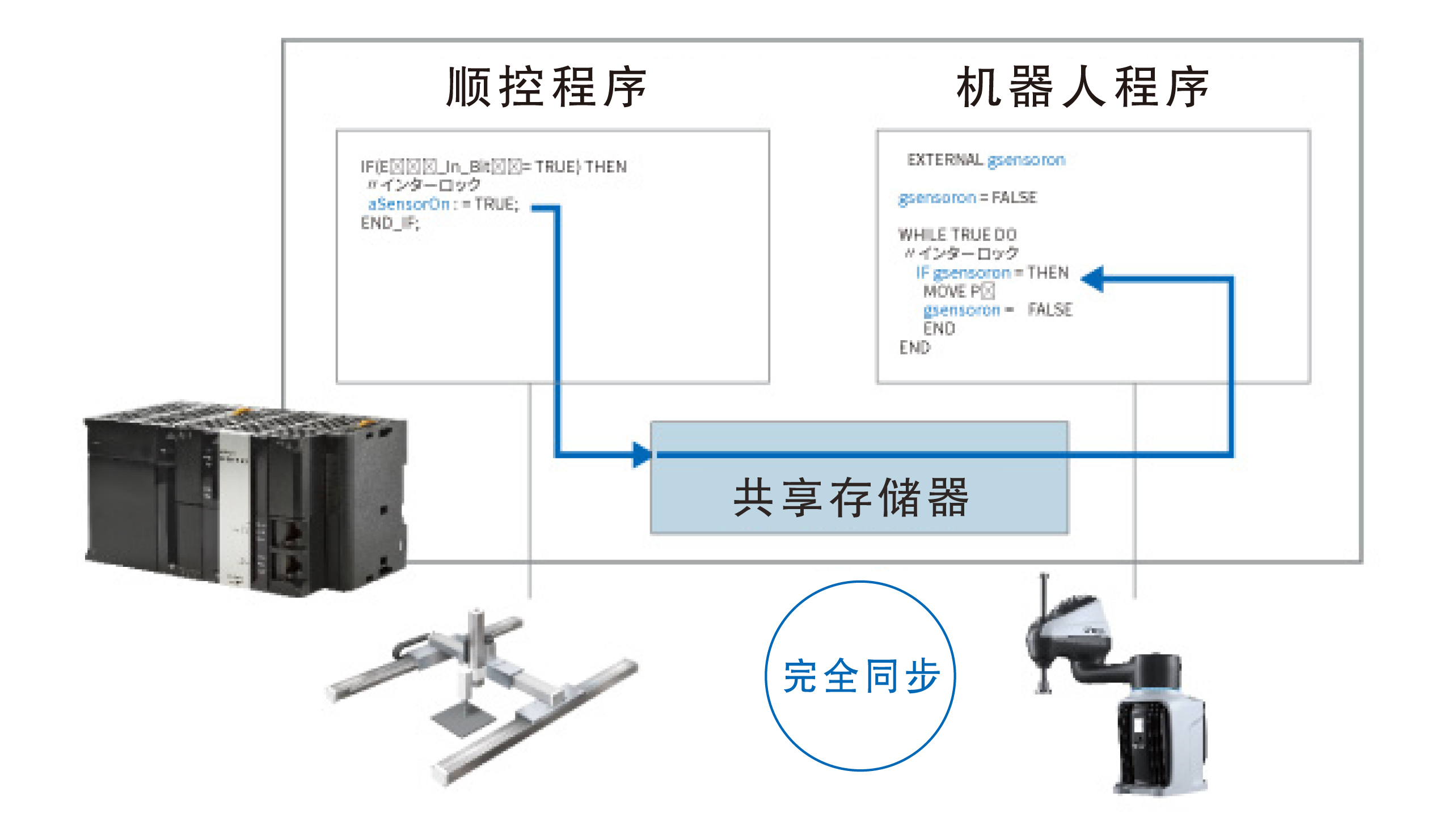
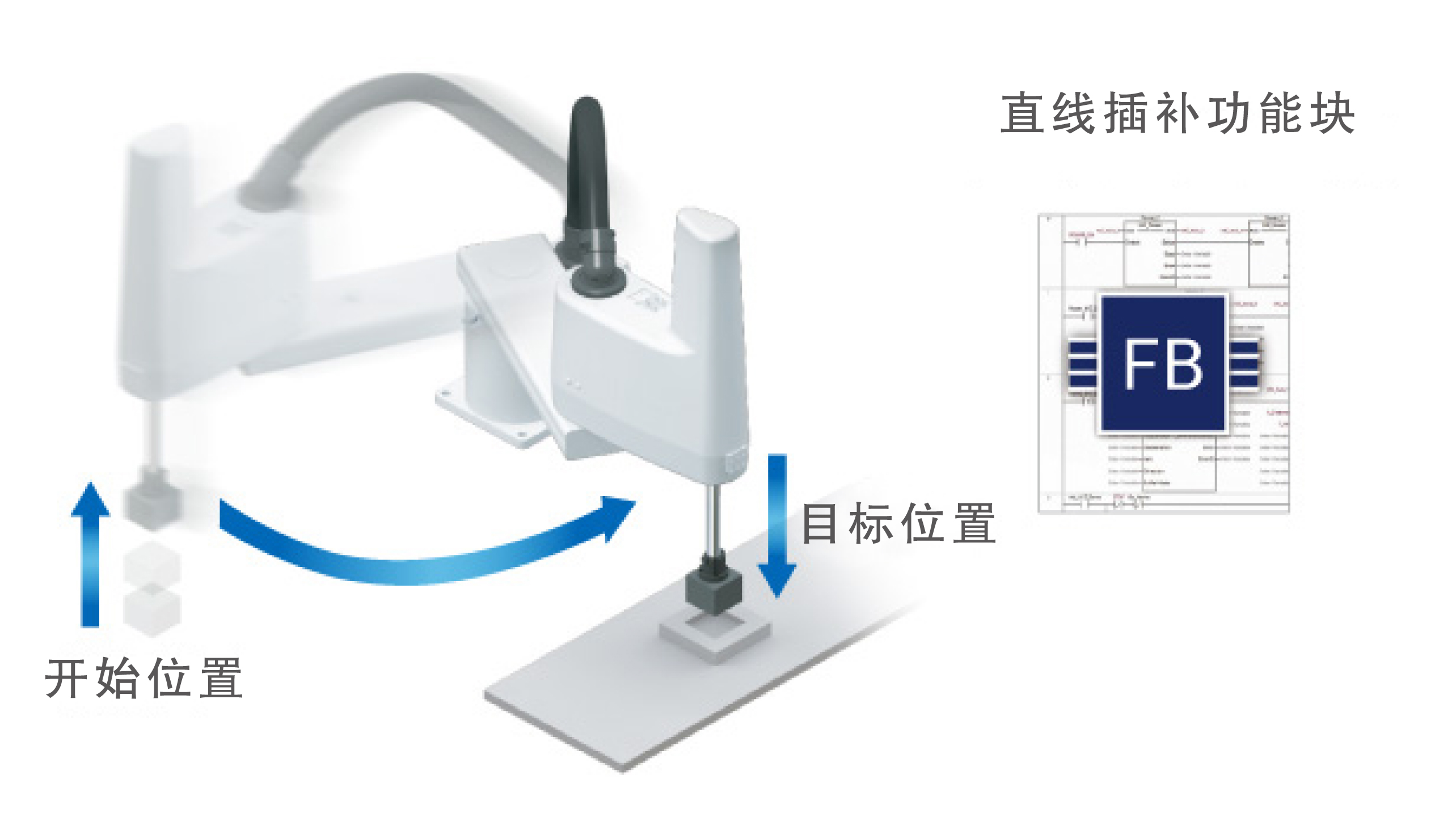
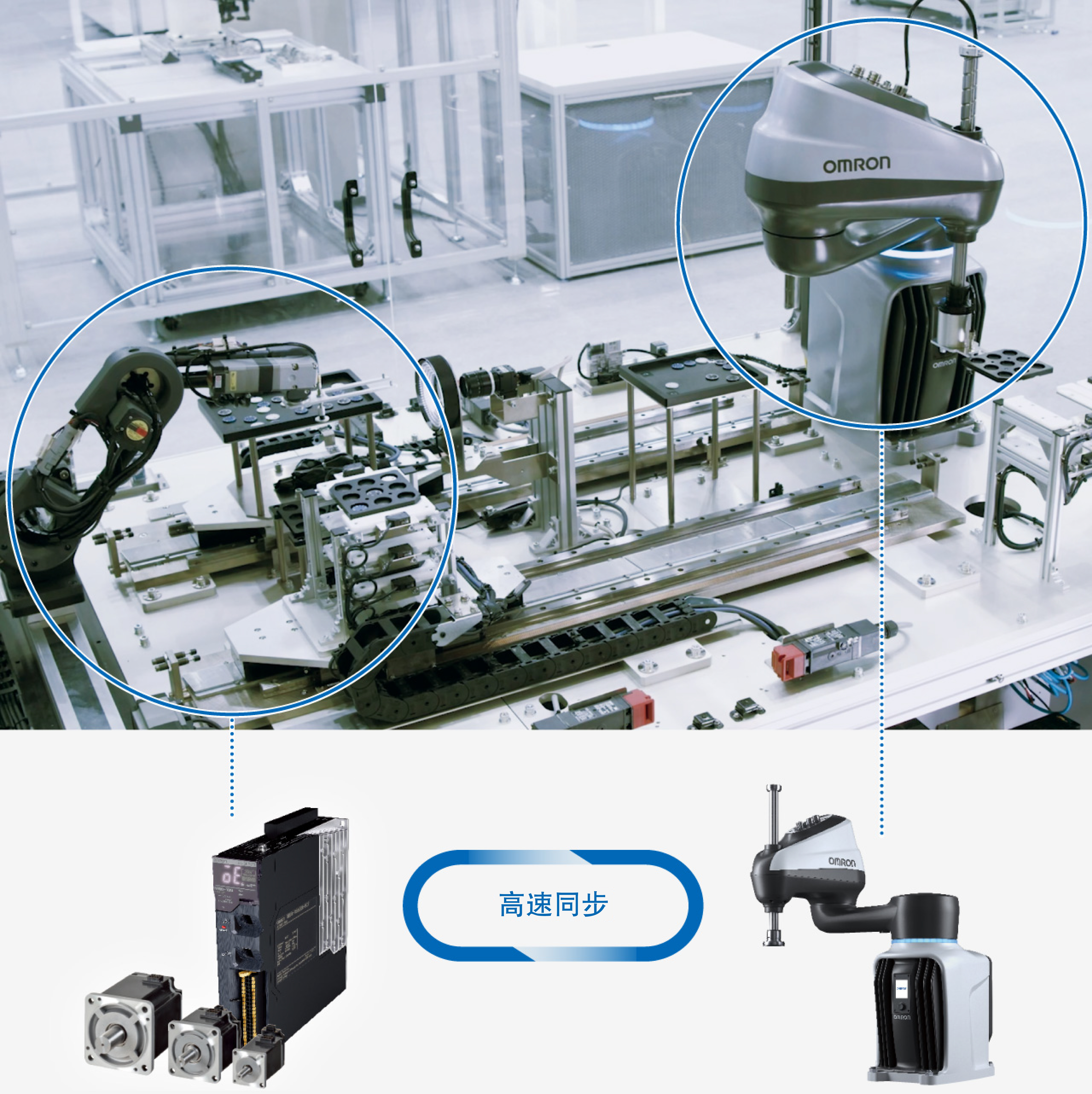
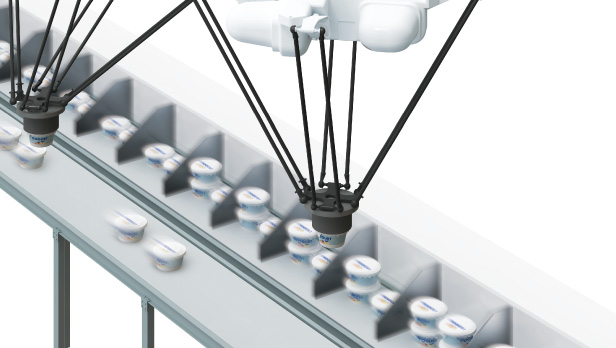
机器人和运动控制的高速同步,
实现组装量和加工量的最大化
将机器人控制和运动控制统合,通过高速、高度同步协作,灵巧地流畅运转,
实现组装量和加工量的最大化。
Safety
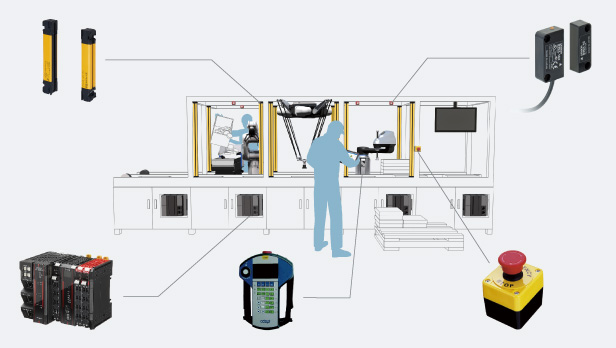
兼顾机器人系统的生产效率和安全性
为了能安心地运行机器人系统,生产效率与安全性两者缺一不可。
新利从产品和服务支持两方面出发,为客户提供生产效率和安全性的支持。
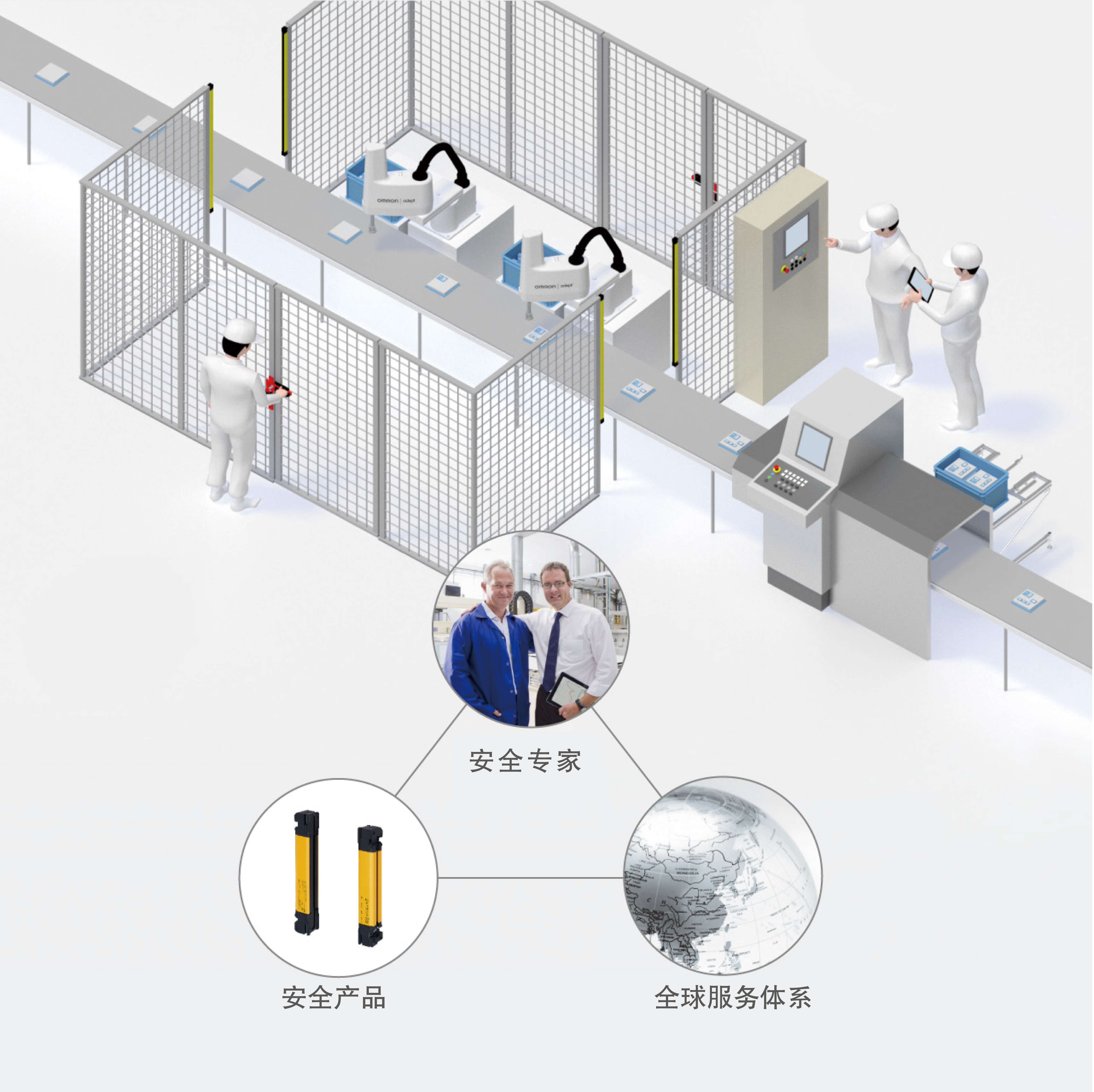

注:安全评估员资格由(一般社团法人)日本电气控制设备工业协会(NECA)制定,机器人安全评估员资格由(一般社团法人)安全全球推进机构(IGSAP)制定,是由日本认证株式会社(JC)统一运营的资格认证制度
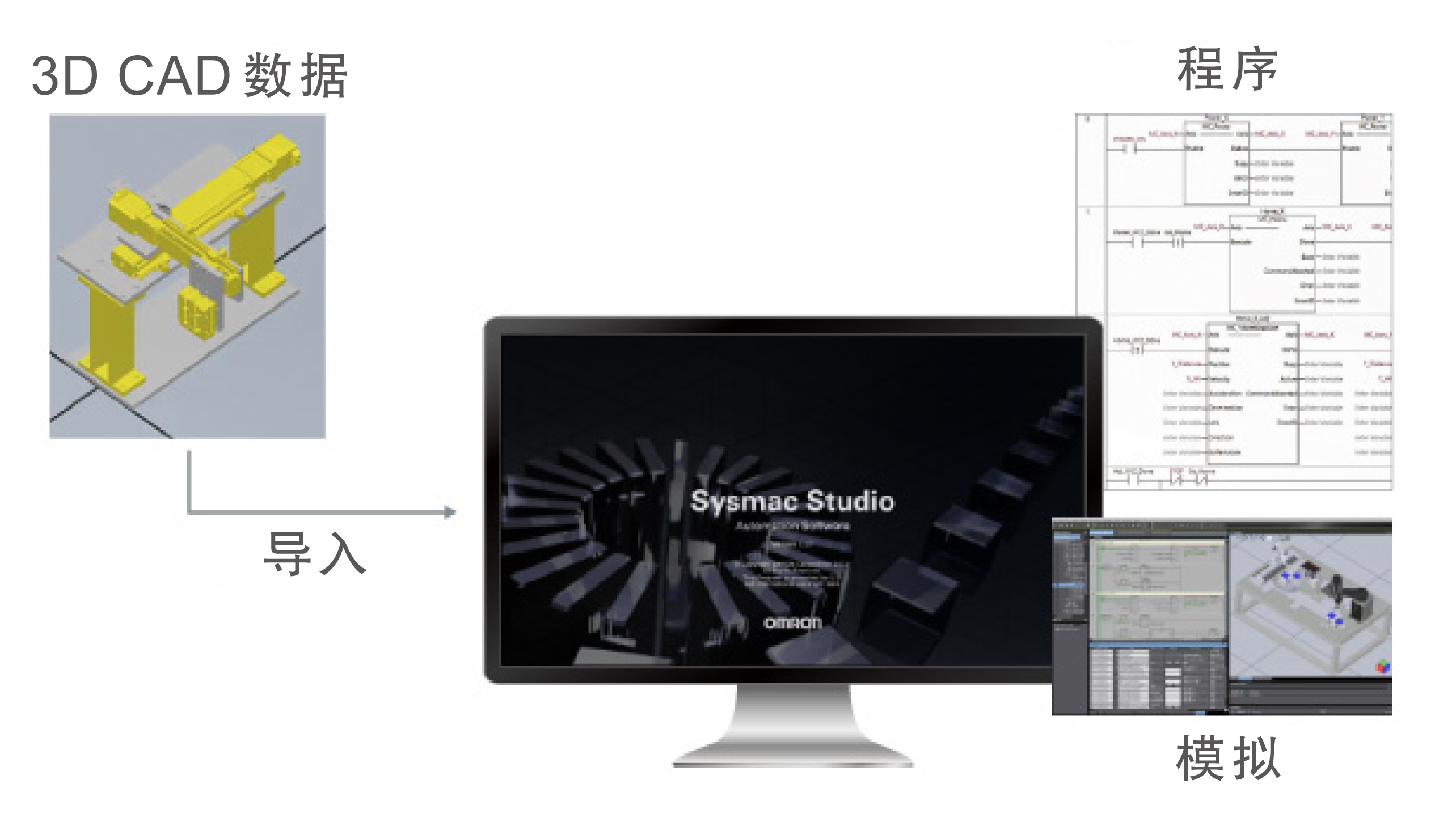
通过3D模拟
缩短开发周期并提高设计品质
自动化软件Sysmac Studio
VIEW MORE


